强化学习期末作业详解
本文是2022春季严瑞东老师《强化学习基础》期末作业的简要汇报
作业要求
本次作业包括三个部分:
- 利用实时动态规划 (RTDP) 完成静态障碍物检测和路径的动态规划;
- 利用S-T图撒点通过动态规划求速度曲线粗解;
- 利用二次规划 (QP) 完成路径曲线和速度曲线的平滑。
整个的学习环境本来预定为由 PengZhenghao et al. 开源的 Metadrive 自动驾驶模拟器,但是由于使用较为复杂,而且本身对于控制方面的知识极为欠缺,所以老师允许我们自行编写环境。
环境总体要求:车道线 (Reference line) 在笛卡尔坐标系下是一条正弦曲线,振幅比波长尺度较小(即连续小弯路),车道上有少数静态圆形障碍物,模拟小车近似为圆形。
背景知识简介
在汇报作业之前,先对一些必要的背景知识进行介绍。
Frenet坐标系
Frenet坐标系是自动驾驶领域为方便轨迹规划而引出的坐标系,即车辆坐标系。其两个坐标轴 S 轴和 L 轴 (或 D 轴) 正交,其中 S 轴表示平行于车道线的方向,即路径切向,L轴表示路径法向,所以其实Frenet坐标系就是车道线的自然坐标系。则 (s,l) 可用于描述车辆在道路中行驶了 s 的路程,车辆偏离中心线(即车道线) l 。这样转换坐标系后可将总问题变为三个子优化问题:一个横向优化、纵向优化和中线问题。从笛卡尔坐标系转换到Frenet坐标系可见文章
作业架构
主要分为四个部分,包括环境建构,路径规划,速度规划,可视化。一共六个 python 文件,分别实现如下功能:
roadenv.py
实现了道路环境类(roadEnv)的搭建,其中宏观路径的 reference_line 在笛卡尔坐标系下是 的正弦曲线,车道宽2m。x 方向取了 0~100m 的距离,然后原本是打算利用随机设置障碍物加 dfs 搜索来制作障碍物的,但是由于容易出现障碍过多或过少的情况,所以最后从简,在 x=35m 和 x=75m 处设置了两个直径0.5m的圆形障碍。(小车直径为0.1m,不过好像代码中没有怎么体现出来💦)
原本是准备在frenet坐标系下划分栅格,然后计算 的cost,但是这里设置的车道线是正弦函数,不利于获取 函数,(弧长积分是关于 的第二类不完全椭圆积分);又考虑到车道线近似于直线,于是在笛卡尔坐标系划分栅格设置了 的cost,这样规划出的路径误差不算太大。
cost:可参考此文,对于本环境中的cost设置如下式:
其中 为常数系数值, 为小车边界到障碍边界的距离 (这里其实可以略作变通,因为小车和障碍为了简化都变成了圆形,所以计算中心距离即可), 为小车中心到 Reference line 的距离 (即L轴坐标值), 为航向角变化绝对值,这里解释一下,因为原本是打算在 frenet 坐标系划区进行动态规划,但是后来发现将 frenet 坐标变换到笛卡尔坐标有点困难,因为正弦函数的弧长积分是一个关于 的第二类不完全椭圆积分,然后这样要求得 是比较困难的一件事,起码我现在想到的是计算一系列散点然后插值拟合曲线 (显然 是连续的),所以本次就将问题简化,而在笛卡尔坐标下计算航向角变化也更加方便。由前面所述,这样造成的系统误差尚属可接受范围,起码在半定量的实验中可以接受。
然后还有一处是,最后的终点,原本应该是设置奖励值,但这里使用成本,也就是cost时就需要将这个“奖励”设为负数,即负成本。
rtdp.py
实现了利用rtdp(实时动态规划)在 roadEnv 环境中通过状态转移的 cost 求解最佳路径,基本思路就是利用贝尔曼最优方程,求解每一个状态的最优动作 (即最小化成本),然后可以求解出一条路径粗解。
但是事实上,实现路径规划感觉用动态规划真的很少,像是RRT、A*、D*、Dijkstra这种算法明显用得更多吧💦,这样寻路真的计算量太大了吧……虽然用了rtdp不用对每一个状态的value进行更新,但是感觉依旧不值得这样算。可以参考酒井笃志先生的github仓库中pathplanning的一部分,然后还有一个用 JavaScript 写的一个模拟器可以用于辅助理解。
path_smooth.py
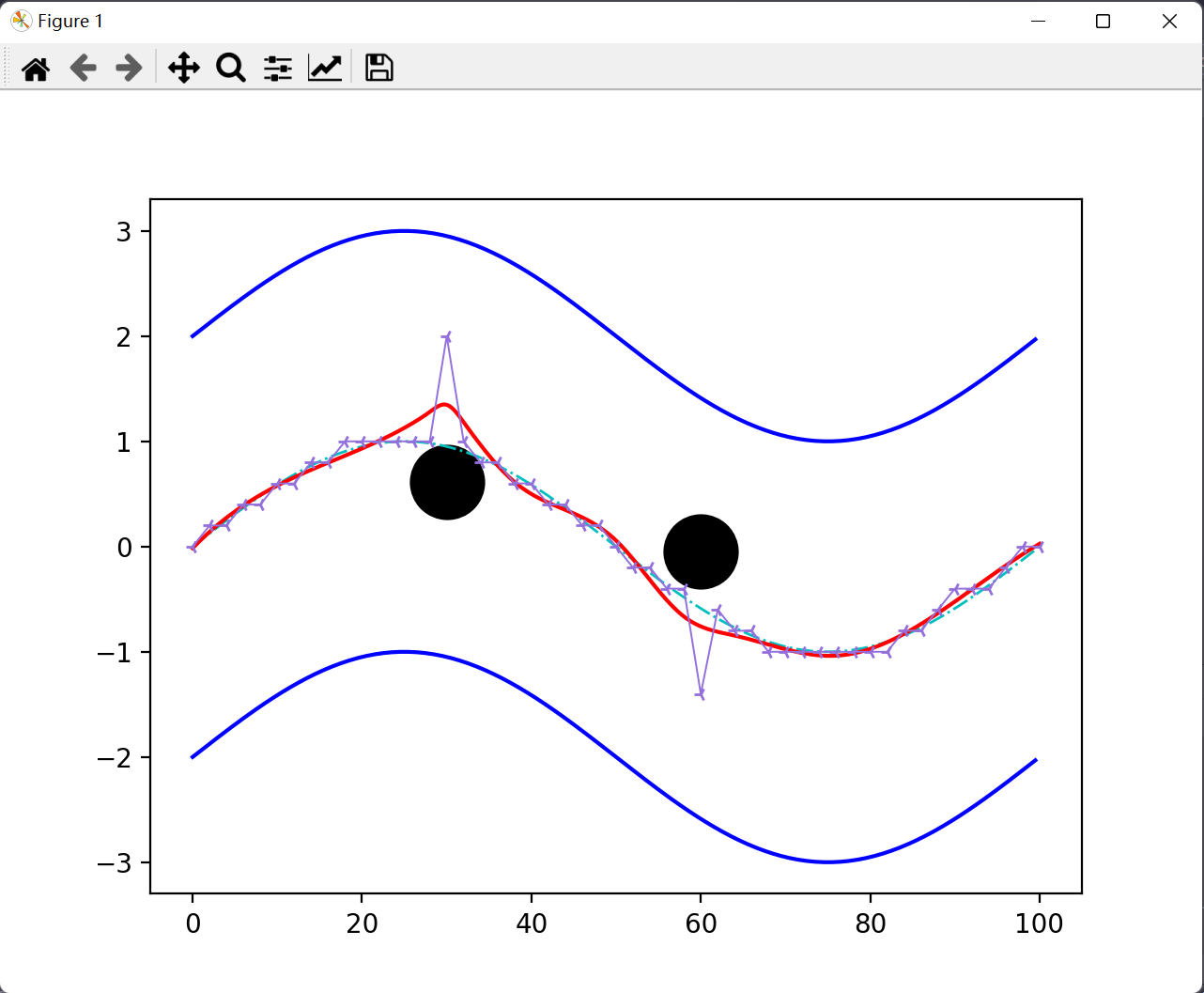
利用 scipy.interpolate 库中的 UnivariateSpline 样条插值法对曲线粗解进行平滑,也就是插值拟合曲线。选择这个方法的理由是,用plt打印出曲线粗解可以发现有部分噪声 (也许前面cost参数的设置不太理想),然后在经过一系列插值法使用后,发现这个一元样条插值最好看 (所以如果要知晓原理逻辑推荐学习计算方法这门课)。下面是图示:
zuobiao.py
包含两个函数:
cartesian_to_frenet : 利用牛顿法迭代求解笛卡尔坐标系转换到frenet坐标系的值;
frenet_to_cartesian : 利用 pynverse 库中的 inversefunc 求解逆函数得到s对应的x值。
这里可以看出其实是可以得到坐标的转换的,但是我并不确定像是百度Apollo计划里是怎么做的,感觉应该和我这样粗暴且误差较大的求解差别甚大,所以再次强调本代码仅供参考,大部分逻辑经过了大刀阔斧的简化。
speed_planing
原本是包含了两个步骤:
- 实现利用dp得到s-t图下的速度曲线粗解;
- 实现利用五次多项式对速度曲线平滑,使速度、加速度和加加速度(jerk)值连续并稳定。
但是!由于cost_table计算时参数设置遇到较大困难:
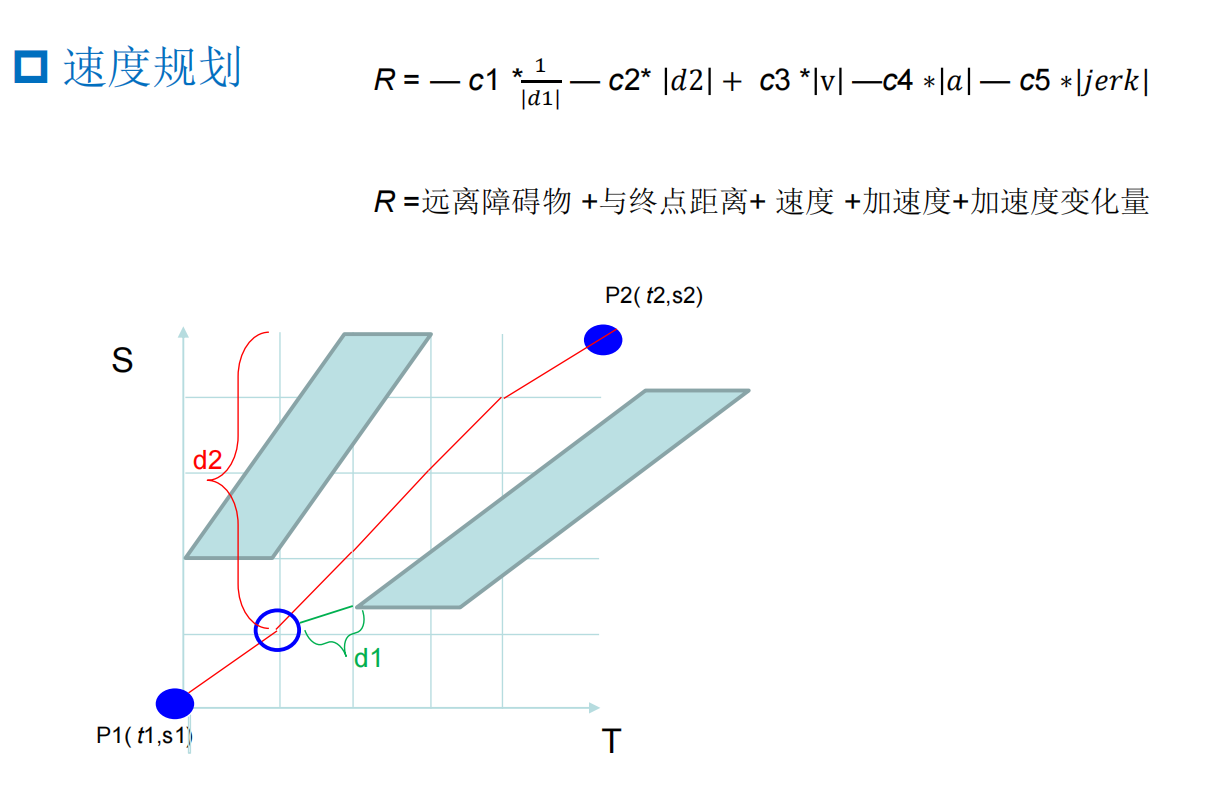
这里需要注意。由于我设置的是静态障碍物,所以实际上应该是一个平行于 t 轴的矩形,至于怎样理解和定义,可参考视频,然后其实这里的动态规划 (我的理解) 就是相当于写一个五重循环更新 dp 数组 (因为如果要求jerk值则需要取四个点,可参考文章)。然后这个 dp 数组就是相当于此文中的一个cost_table,当然也不大对,因为Apollo的代码用的是C++,利用了一些STL,所以可能具体实现不是这样的,不过总体的思路就是在S-T图上撒点动态规划求一个粗解。
但是这几个参数过于复杂,包括相关性、数量级都不是很清楚,想来可能需要一些车辆动力学的知识,遂选择手动估测曲线,取部分中间点代入步骤二得到速度规划,也就是一个平滑连续(且一二三阶导数均连续)的一个S-T曲线。
main.py
调用rtdp,path_smooth, speed_planing 文件获得最后的速度规划和路径规划结果,然后利用matplotlib.pyplot 库进行结果的可视化模拟,可视化模拟,由于取的是100米长(即一个周期),然后平均速度大小约为10m/s,所以大概是12秒左右,以每0.1秒为1帧(SIMLOOP),然后利用函数plt.cla和plt.gcf来绘制动图,至于怎么保存GIF图以及最后有一点点没能跑完整,我试图解决了一下,但是没有什么好的处理方法,加上作业ddl了,就大概水了上去。
总结
这个作业其实我的完成度相当低,但是收获蛮大的,譬如知道了大体逻辑,知道了什么用什么方法,然后亲自上手码代码也能体会到一个成熟的工程,对于系统架构的完整和可靠的严格要求,以及对算力的刚需。我虽然只是一个自动驾驶的小白,甚至现在还可以说是门外汉,但是能感受到其中庞大的知识体系,而且每一步都不只是自动驾驶,无人机、RPG游戏自动寻路、导航、轨迹追踪,无人机控制……也不只是强化学习,强化学习只是一种解决的思路。
如果有大佬发现我的错误或者知识误区,请不吝赐教。